
Tiered Mentoring Program
Dirty Work: Using Robotics to Understand Animal Digging
Dr. Henry Astley and Sam Edwards
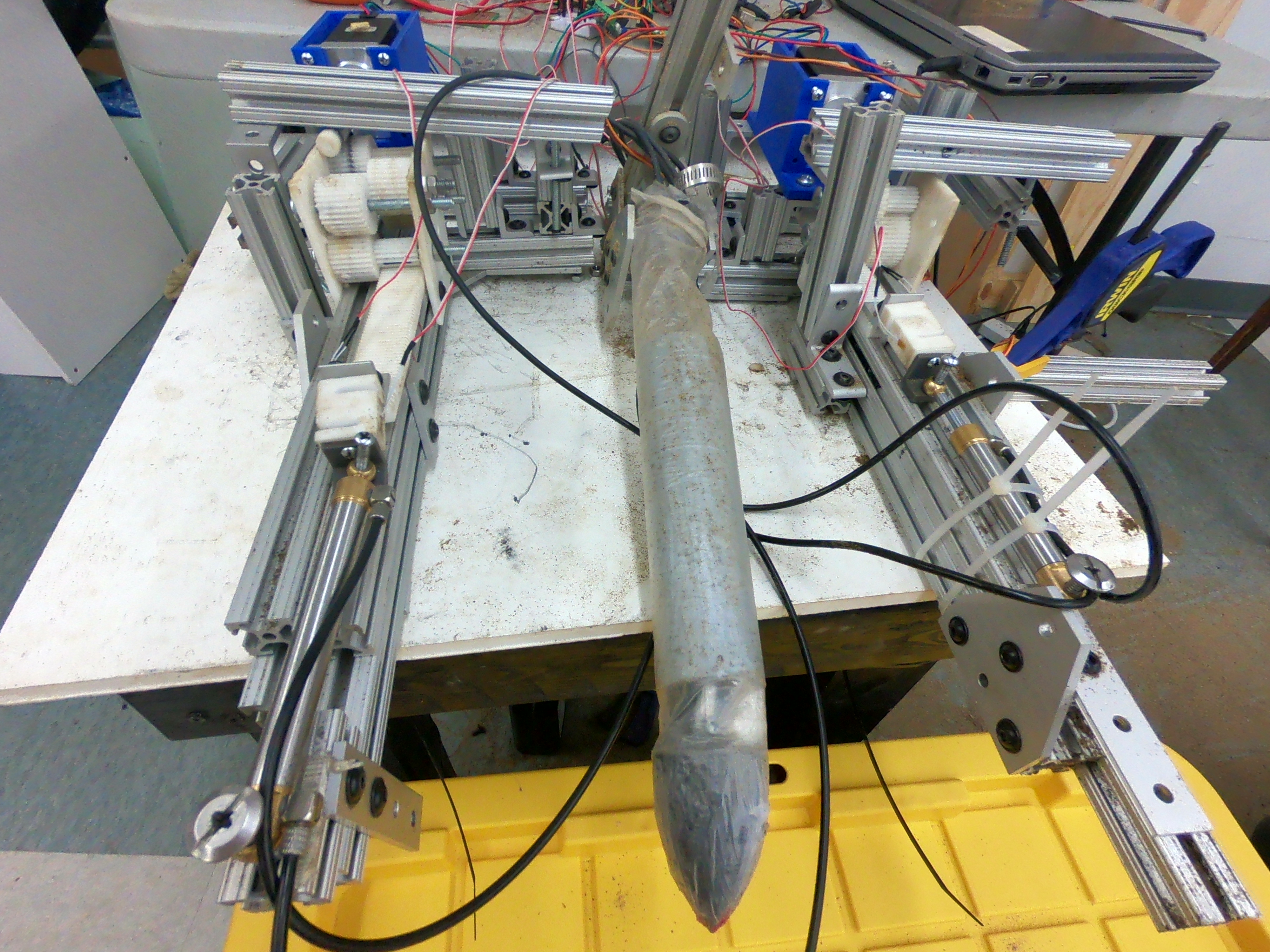 The mechanics of burrowing and tunneling through granular material are not well understood. Few burrowing machines exist for practical application that match the performance of living organisms. A better understanding and application of the principles of excavation and movement within granular media can be relevant to the fields of construction, resource extraction, interplanetary exploration, and search and rescue. In this project, you will work with PhD student Sam Edwards and Dr. Henry Astley to explore the mechanics of subterranean locomotion through the use of a robotic model.
The mechanics of burrowing and tunneling through granular material are not well understood. Few burrowing machines exist for practical application that match the performance of living organisms. A better understanding and application of the principles of excavation and movement within granular media can be relevant to the fields of construction, resource extraction, interplanetary exploration, and search and rescue. In this project, you will work with PhD student Sam Edwards and Dr. Henry Astley to explore the mechanics of subterranean locomotion through the use of a robotic model.
Benefits:
- Learn about biomechanics and limbless locomotion
- Learn 3D printing
- Learn principles of robotics and automation such as coding, hydraulics, gear systems, motor actuation, sensors, and control
- Learn data processing methods
- Play in sand!